Soluciones geoespaciales
¿Cuáles son los pros y los contras al comparar Mavic 3 Enterprise, Zenmuse L1 y Zenmuse P1?
| Producto | ventajas | Contras |
| M350 RTK + Zenmuse L1 | - Fuerte adaptabilidad: no se ve afectado por las condiciones de iluminación y es capaz de modelar en entornos de baja textura. - Los resultados se pueden utilizar para extraer un modelo de elevación digital (DEM) con penetración del dosel. - Capaz de capturar fácilmente estructuras finas a partir de la salida de la nube de puntos, como líneas de transmisión. • Alta eficiencia de modelado: un vuelo puede cubrir un sitio de 494 acres[1]. | - Precisión relativamente dependiente del estado inicial de POS - Se requiere un procesamiento posterior adicional de los datos de la nube de puntos mediante el uso de software de terceros para proporcionar una nube de puntos clasificada entregable para su uso. |
| M350 RTK + Zenmuse P1 | - Admite múltiples modos de operación: ortofoto 2D, oblicuo 3D, fotografía de corto alcance, etc. - Alta eficiencia operativa: un vuelo puede recolectar 741 acres de ortofotos [2] - Alta precisión: puede alcanzar una precisión de levantamiento catastral de 1:500 sin aplicar GCP. - Alto número de píxeles: hasta 45 millones de píxeles con cámara de fotograma completo. | - No se puede resolver el problema del modelado nocturno o el área de modelado con textura baja. - Como las soluciones de fotogrametría no pueden penetrar el dosel como LiDAR, los modelos resultantes se limitan a los resultados DSM y no pueden producir resultados DEM. - El proceso de fotogrametría requiere una potencia de procesamiento de GPU significativamente mayor para realizar la aerotriangulación y generar modelos a partir de imágenes sin procesar. Por el contrario, los datos LiDAR solo necesitan convertirse a un formato universal para su uso. Por lo tanto, la eficiencia de las fases de captura y procesamiento de datos en la solución de fotogrametría sería menor en comparación con la solución LiDAR. |
| Mavic 3 Empresa | - Umbral de entrada bajo, muy rentable; - Pequeño y portátil, fácil de usar. - En comparación con el Phantom 4 Pro o el Phantom 4 RTK, el Mavic 3 Enterprise es más liviano y portátil, con mejores capacidades para evitar obstáculos, mayor duración de la batería y especificaciones de cámara superiores. | - Eficiencia operativa relativamente baja en comparación con P1 - Recuento de píxeles de cámara más bajo en comparación con P1 - No apto para operaciones a gran escala - Las desventajas de Zenmuse P1 también existen con Mavic 3 Enterprise |
Nota:
[1] Velocidad de vuelo de 22,37 mph, altitud de vuelo de 328 pies, superposición lateral del 20 %, tiempo de recopilación de datos de 30 minutos, densidad de nubes de puntos superior a 200 puntos/m²*.
[2] Usando una lente de 35 mm, GSD de 3 cm, configuración de la misión de vuelo: superposición de rumbo del 75 %, superposición lateral del 55 %.
Al comparar las capacidades de fotogrametría entre cámaras:
| | Mavic 3 Enterprise con módulo RTK (cámara ancha) | Matrice M350 RTK + Zenmuse P1 | Matrice M350 RTK + Zenmuse L1 |
| Tamaño | Talla pequeña | Tamaño medio | Tamaño medio |
| Grado topográfico | Sí | Sí | Sí |
| Soporte RTK/PPK | Sí | Sí | Sí |
| Peso bruto (cm) | H(m)/36,5 | 24 mm: alto (m)/5535 mm: alto (m)/8050 mm: alto (m)/120 | H(m)/36,5 |
| Tamaño del sensor | 4/3"5280 × 3956 (4:3) | Fotograma completo (35,9 × 24 mm) 8192 × 5460 (3:2) | 1"5472 × 3648 (3:2) |
| Resolución fija | 20MP | 45 MP | 20MP |
| Tamaño de píxel | 3,3 μm | 4,4 μm | 2,4 μm |
| Opción de lente | Campo de visión equivalente a 12 mm/24 mm 84,0° | DL 24 mm; campo de visión 84,0° | |
| DL 35 mm; campo de visión 63,5° | | | |
| DL 50 mm; campo de visión 46,8° | Equivalente a 8,8 mm/24 mmFOV 84,0° | | |
| Obturador mecánico | Sí (1/2000-8 s) | Sí (1/2000-1 s) | Sí (1/2000-8 s) |
| Intervalo mínimo de fotos | 0.7s | 0.7s | 2.5s |
| Tiempo de vuelo | Hasta 42 min (Con Módulo RTK) | Hasta 44 minutos | Hasta 42 minutos |
| Requisito de memoria | microSDUHS-I Clasificación de velocidad de grado 3 o superior Capacidad máxima: 512 GB | Dakota del Sur | |
| Clasificación UHS-I o superior | | | |
| Capacidad máxima: 512 GB | MicroSD | | |
| Clasificación UHS-I Speed Grade 3 o superior | | | |
| Capacidad máxima: 256 GB | | | |
| Resistencia máxima al viento | 12 m/s | 12 m/s | 12 m/s |
| Soporte oblicuo inteligente | Sí | Sí | No |
| Seguimiento del terreno en tiempo real | Sí | No | No |
| SDK y soporte de aplicaciones de terceros | Sí | Sí | Sí |
¿Cómo accedo a los parámetros de distorsión de la lente?
Para acceder a los parámetros de distorsión de la lente manualmente, abra la imagen en formato ".jpg" como un archivo de texto, busque la palabra clave "DewarpData" en el campo de datos XMP. El formato del texto debe ser similar a: drone-dji: DewarpData = “2023-03-13;3663.4800000000…”
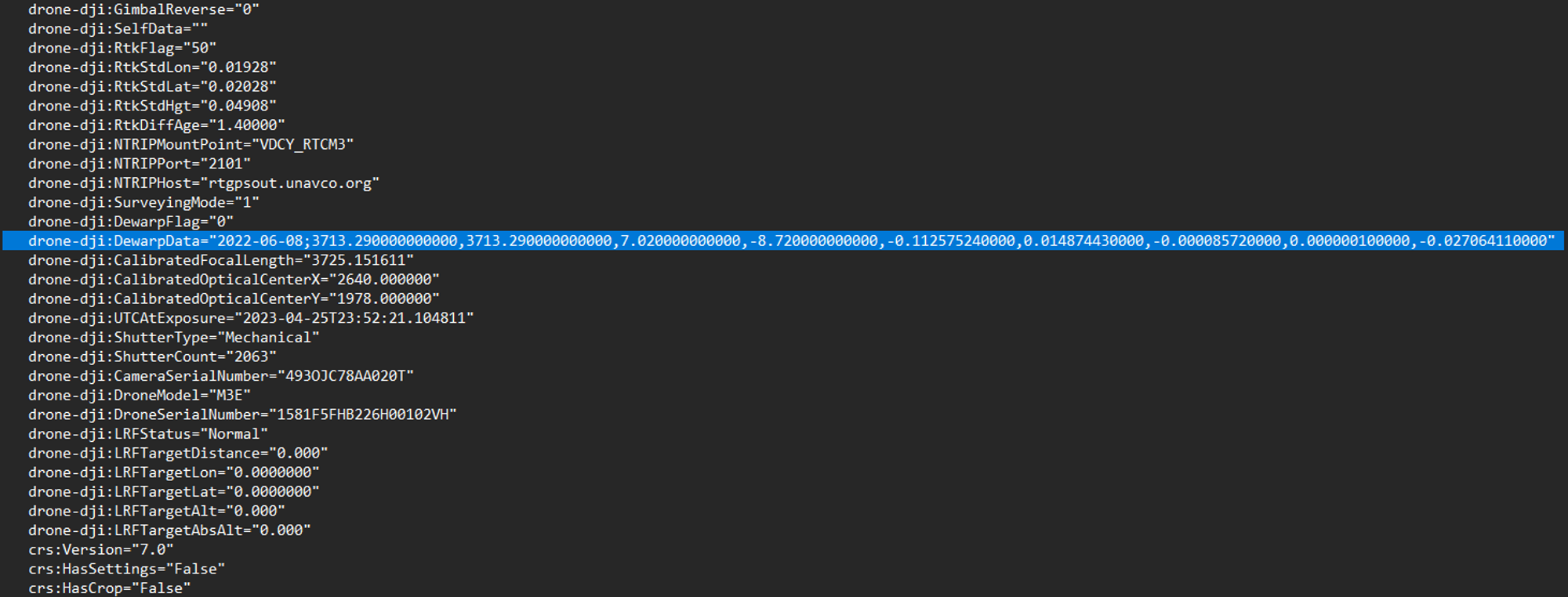
Los números en secuencia corresponden a: “calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3” “fx,fy” representan la distancia focal en el píxel “cx,cy” representan el centro óptico expresado en coordenada de píxel (punto de origen como centro de la imagen) ”k1,k2, k3” representan la distorsión radial ”p1,p2” representan la distorsión tangencial
Para obtener más información, consulte la siguiente Guía de calibración de la cámara con OpenCV .
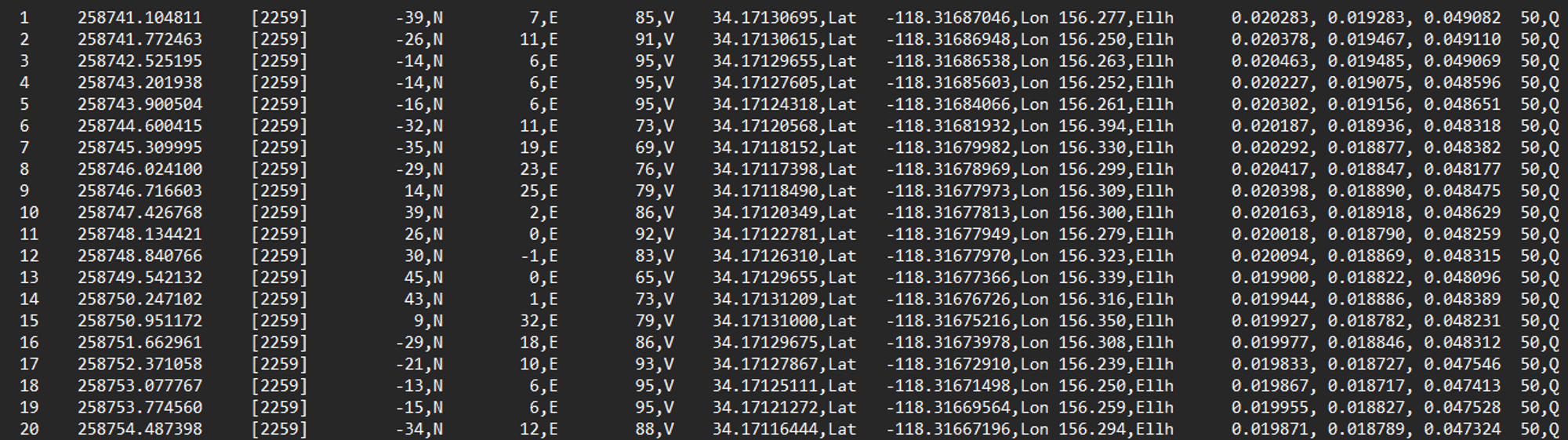
¿Qué representa cada columna de datos dentro del archivo XXX_Timestamp.MRK?
Columna 1: Número de foto correspondiente
Columna 2: El tiempo de exposición del GPS, segundos de la semana (Hora UTC)
Columna 3: El tiempo de exposición de la semana del GPS (Hora UTC)
Columna 4: Valor de compensación de fase entre la antena norte (N) al centro del sensor CMOS. (Unidad: milímetro)
Columna 5: Valor de compensación de fase entre la antena este (E) y el centro del sensor CMOS. (Unidad: milímetro)
Columna 6: valor de compensación de fase entre la antena direccional hacia arriba y hacia abajo (hacia abajo como positiva) (V) al centro del sensor CMOS. (Unidad: milímetro)
Columna 7: Latitud en tiempo real (Columna 8) y longitud (Columna 8) del centro CMOS obtenido en el momento de la exposición, en grados decimales.
Columna 9: Altura en tiempo real del centro CMOS obtenida en el tiempo de exposición, en metros. Esta altura es la altura geodésica (comúnmente conocida como altura del elipsoide), relativa a la superficie del elipsoide de referencia predeterminada (los usuarios pueden definir su propio modelo de elipsoide, el valor predeterminado es WGS84, los usuarios pueden configurarlo para otros elipsoides accediendo a diferentes sistemas/puntos de referencia de estaciones CORS, como CGCS2000). Tenga en cuenta que esta altura no se basa en el punto de referencia de elevación EGM96/2008 de uso común (altura ortométrica) en todo el mundo.
Columnas 10 a 12: desviación estándar de los resultados de posicionamiento en las direcciones norte, este y hacia arriba, respectivamente, lo que indica la precisión relativa del posicionamiento en las tres direcciones. La unidad es el metro.
Columna 13: estado RTK, 0-sin posicionamiento, modo de posicionamiento de 16 puntos únicos, solución flotante de 34 RTK, solución fija de 50 RTK. Cuando la bandera de una foto no es 50, no se recomienda usar esta foto directamente para el mapeo.
Zenmuse L1
¿Es posible usar puntos de control de tierra (GCP) para procesar datos LiDAR en DJI Terra?
Terra no admite la importación de GCP para datos LiDAR. Sin embargo, para aplicar los GCP a los datos L1 LiDAR, se recomienda utilizar un software de terceros, como el software TerraSolid UAV, para aplicar los GCP a los datos L1 LiDAR.
¿Cuál es el formato de salida de datos de la Zenmuse L1 además de LAS?
PUNTOS, CAPA, PCD, S3MB
¿Es posible procesar datos sin procesar L1 sin una conexión RTK? ¿Se pueden procesar los datos sin procesar de Zenmuse L1 durante un vuelo regular con GPS?
Sí, puede procesar datos sin procesar L1 sin una conexión RTK. Sin embargo, debe agregar un archivo de observación de la estación base (archivo Rinex, RTCM, OEM o UBX) a la carpeta de datos sin procesar L1 junto con el resto de los datos sin procesar para procesar y generar correctamente el archivo de nube de puntos dentro de DJI Terra. Este proceso se denomina cinemática posterior al proceso (PPK).
Para obtener más información sobre este proceso, consulte la guía de funcionamiento, específicamente la página 11: https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
¿Es posible fusionar datos de múltiples vuelos con Zenmsue L1 en una sola nube de puntos en DJI Terra?
Sí, puede importar varias carpetas de datos sin procesar capturadas de vuelos L1, marcar la opción "Salida combinada" y generar una nube de puntos en un archivo LAS usando Terra.
¿Cuál es la diferencia entre retorno simple, doble y triple y cuáles son las mejores prácticas para usarlos?
Modo de retorno/eco: indica que el lidar puede recibir múltiples retornos después de disparar un haz de luz láser.
El modo de retorno único significa que se dispara un punto láser y el LiDAR puede recibir como máximo un retorno. El modo de doble retorno significa que se dispara un punto láser y el LiDAR puede recibir como máximo dos retornos. El modo de triple retorno significa que el LiDAR puede recibir como máximo tres retornos por cada punto láser.
Si solo se necesita información de superficie o DSM, entonces el modo de retorno único es suficiente. Sin embargo, en escenarios tales como estudios forestales que requieren penetración en el dosel y datos DEM, es necesario el modo de retorno doble o triple.
¿Se puede montar Zenmuse L1 en el cardán doble hacia abajo o hacia arriba de M350/M300 RTK?
No. Zenmuse L1 solo se puede montar en el cardán inferior único de M300/M350 RTK. Si lo usa en el cardán doble hacia abajo o hacia arriba, la ubicación del cardán sería diferente y la ubicación predefinida, por lo que la precisión se vería afectada.
Zenmuse P1
¿Funcionará la lente Zenmuse X7 en la Zenmuse P1?
Solo los de 24mm, 35mm y 50mm. El 16 mm no funciona con el P1 debido al tamaño del sensor.
La precisión cumplirá con los requisitos de grado topográfico después de la calibración adecuada. Puede usar el software DJI Terra para calibrar y sobrescribir nuevos parámetros de lentes por primera vez, procedimiento que se proporciona a continuación.
Cambié una lente Zenmuse P1 y ahora todos los parámetros de distorsión de la lente de la cámara están obsoletos, ¿cómo recalibro los parámetros intrínsecos con una lente nueva?
Para verificar si la lente P1 está calibrada correctamente, primero abra la foto P1.jpg como un archivo de texto y busque el campo de datos XMP "DewarpData". Si este campo no aparece en la lista, entonces la lente no se calibró correctamente. Para recalibrar los parámetros de distorsión de la lente, siga el procedimiento a continuación:
- Recopilar datos de calibración
- Se recomienda calibrar en áreas con grandes diferencias de elevación, como edificios o laderas.
- Usa Smart Oblique Capture o Oblique Mission (cinco rutas) para planificar la misión.
- Requisitos de parámetros: las imágenes recopiladas deben ser más de 100, la tasa de superposición frontal no debe ser inferior al 80% y la superposición lateral no debe ser inferior al 70%, la imagen oblicua representa no menos de 2/3. (Sin límite de altitud de vuelo)
- Encienda RTK y despegue después de RTK FIX.
- Modelado: use DJI Terra v2.3.1 y la versión superior para crear una nueva misión de reconstrucción 3D y comenzar a modelar
- Calibración
- Después de completar el modelado, abra la carpeta, busque el archivo sfm_report.json en el directorio AT-report y cópielo en la tarjeta SD de la cámara;
- Inserte la tarjeta SD en la cámara P1, conéctela a la aeronave y enciéndala. Luego, la cámara escribirá automáticamente los parámetros internos después de la calibración.
- Tome una foto, ábrala con el Bloc de notas y busque XMP. Si puede encontrar DewarpData, significa que la calibración de los parámetros internos de la cámara se ha realizado correctamente.
¿Se puede montar Zenmuse P1 en el cardán doble hacia abajo o hacia arriba de M350/M300 RTK?
No. Zenmuse P1 solo se puede montar en el cardán inferior único de M300/M350 RTK. Si lo usa en el cardán doble hacia abajo o hacia arriba, la ubicación del cardán sería diferente y la ubicación predefinida, por lo que la precisión se vería afectada.
DJI Tierra
¿Existe un software de procesamiento de fotogrametría que pueda unir y convertir imágenes de drones en un mapa 2D o un modelo 3D?
Sí, puede usar el software DJI Terra para este propósito. DJI Terra puede generar un modelo de superficie digital (DSM) y un mapa de ortofoto digital verdadero (TDOM) en formato geotiff y malla 3D o modelos de nubes de puntos.
¿Qué software recomienda para procesar las imágenes en un mapa de ortofotos y producir las superficies digitales?
Recomendamos utilizar DJI Terra para el procesamiento fuera de línea o un software de terceros que se ajuste a sus necesidades.
¿De qué debo asegurarme antes de procesar fotos de drones en DJI Terra?
Dentro de la configuración de la cámara, asegúrese de que la opción de "obturador mecánico" esté habilitada y la opción de "corrección de la distorsión" esté desactivada antes del vuelo.
Si está utilizando PPK, asegúrese de que los datos de posición de su imagen sean correctos. Para RTK, no hay nada adicional que deba hacer con las fotos.
¿Qué cambios de procesamiento adicionales se pueden aplicar a los datos de imágenes de drones importados dentro de Terra?
Al procesar con Terra, no hay configuraciones para ajustar la concentración de color, la exposición y otras propiedades. Los usuarios solo pueden modificar los datos POS de la imagen, que incluyen sistemas de coordenadas y ángulos de Euler. Sin embargo, DJI Terra proporciona funciones adicionales, como la reducción de la neblina, el perfeccionamiento de la superficie del agua y la uniformidad de la luz, para garantizar la calidad del resultado de la reconstrucción.
Durante el vuelo, ¿cómo puede minimizar las imágenes borrosas capturadas por drones?
Recomendamos configurar la velocidad de obturación a más de 1/500 s, habilitar el obturador mecánico, configurar ISO en automático y ajustar la apertura correspondientemente.
¿La información de GPS/IMU está adjunta al campo de metadatos de la foto?
Sí, también puede consultar las páginas 22 y 23 de nuestro manual P1 para obtener más información sobre el campo de metadatos XMP: Zenmuse_P1 _User Manual_EN_v1.2_3.pdf (djicdn.com)
¿Se pueden calibrar/clasificar los datos LiDAR procesados en DJI Terra?
No hay otra clasificación que la tierra. Terra también tiene características básicas para reducir el ruido, adelgazando la nube de puntos.
¿Están los datos de trayectoria de Zenmsue L1 en un archivo separado de la nube de puntos LAS?
Sí, se genera en formato "sbet.out" en la carpeta de resultados del proyecto Terra.
El sensor Zenmuse L1 LiDAR también tiene una cámara RGB, ¿son los datos de salida una nube de puntos coloreada?
Las fotos se pueden capturar al mismo tiempo que los datos de la nube de puntos sin procesar. Estas fotos se pueden utilizar para el procesamiento de fotogrametría o la colorización de nubes de puntos.
Terra convertirá los datos en una nube de puntos LAS, pero ¿qué versión de LAS v1.2 o 1.4?
LAS v1.2
¿Cuál es el flujo de trabajo recomendado para la Zenmuse L1?
Consulte nuestra Guía de operaciones de L1 disponible en la página de descargas de L1 .
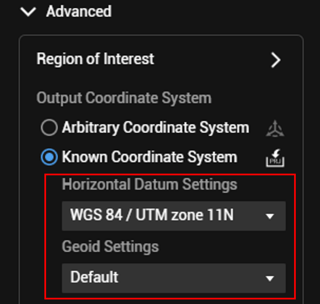
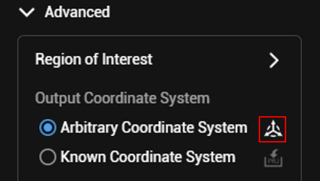
¿Cómo generar el proyecto de fotogrametría en un sistema de coordenadas conocido?
En la opción "Avanzado" - "Sistema de coordenadas de salida" - "Sistema de coordenadas conocido" - seleccione el sistema de coordenadas conocido de "Configuración de referencia horizontal" y "Configuración de geoide".
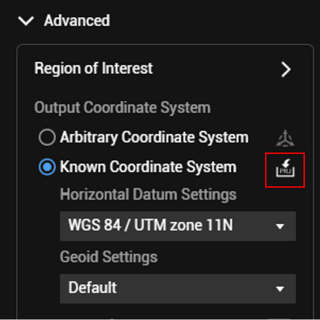
La lista de sistemas de coordenadas conocidas de Terra no tiene el sistema de coordenadas que necesito. ¿Cómo configurarlo?
- Si tiene el archivo de proyección del sistema de coordenadas del sistema de coordenadas en formato ".prj", en la opción "Avanzado" - "sistema de coordenadas de salida" - "Sistema de coordenadas conocido" - haga clic en el icono de importación PRJ y seleccione para importar el sistema de coordenadas en formato PRJ.
Si el sistema de coordenadas de destino utiliza un sistema cartesiano personalizado, puede transformar el resultado de TDOM/Modelo en el sistema cartesiano personalizado mediante la herramienta de transformación de siete parámetros. Consulte la página 29 del manual de usuario de Terra para obtener instrucciones detalladas sobre este proceso. https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf
Si el error de salida es significativamente mayor al seleccionar un sistema de coordenadas verticales, ¿cómo se debe manejar?
- El sistema de coordenadas verticales de Smart Map solo utiliza información del sistema de coordenadas verticales disponible públicamente. Confirme si se agregó el archivo de elevación. Para obtener información específica, visite el sitio web https://cdn.proj.org/ .
- Si el sistema de coordenadas verticales utilizado no tiene un archivo de elevación agregado y el archivo de anomalías de elevación para esa área no es público, se recomienda mejorar la precisión de la elevación agregando más GCP.
Seguimiento del terreno
¿Cómo puede utilizar la función Terrain Follow en la aplicación Pilot 2?
Hay varias formas de planificar vuelos de Terrain Follow en la aplicación Pilot.
- El modelo ASTER GDEM V3 30m está integrado en la aplicación Pilot como opción. Seleccione la misión de mapeo, habilite Terrain Follow, seleccione el archivo DSM y luego elija descargarlo de Internet.
- Importe DSM/DEM en formato TIFF a Pilot, seleccione la misión de mapeo, habilite Terrain Follow, seleccione el archivo DSM, luego elija el TIFF para importar el modelo de terreno.
- Seguimiento del terreno en tiempo real (solo disponible en Mavic 3 Enterprise, térmico y multiespectral).
Aquí hay un cuadro de resumen rápido que explica la compatibilidad de la función Terrain Follow con varios modos de misión:
| Tipos de misiones que ahora admiten seguimiento de terreno |
| | Mapeo 2D | Oblicuo inteligente | Oblicuo | Lineal |
| M3E DSM Siguiendo | ✓ | ✓ | ✓ | ✓ |
| Seguimiento del terreno en tiempo real M3E | ✓ | ✓ | X | ✓ |
| M3T DSM Siguiendo | ✓ | X | ✓ | ✓ |
| Seguimiento de terreno en tiempo real M3T | ✓ | X | X | ✓ |
| M30 DSM Siguiendo | ✓ | X | ✓ | ✓ |
| M300 RTK DSM Siguiente | ✓ | ✓
(Solo con P1) | ✓ | ✓ |
¿Por qué no puedo importar un archivo tiff WGS84 DSM a la aplicación Pilot 2?
Utilice Geodetic WGS84 en lugar del WGS84 proyectado. Pilot 2 solo reconocerá el EPSG 4326 Geodetic WGS84 DEM/DSM.
Formatos de fotos y configuración de la cámara
¿Cuál es la lista de formatos de fotos para las cámaras Mavic 3 Enterprise, Zenmuse P1 y Zenmuse L1?
- L1: JPG
- P1: JPG+DNG
- Mavic 3 Empresa: JPG+DNG
¿Qué ajustes de entrada de cámara se pueden cambiar?
Configuración del modo de cámara (Auto, S, A, M), ISO, apertura, velocidad de obturación, valores de exposición, modo de enfoque (AF/MF).
¿Puede el sensor de la Zenmuse P1 disparar archivos TIFF grandes/pequeños de 8/16 bits?
No, pero la Zenmuse P1 emite sin procesar en DNG
¿Cuáles son algunos ajustes de cámara recomendados para Mavic 3 Enterprise, Mavic 3 Multispectral y Zenmuse P1 al realizar misiones de fotogrametría?
Para la configuración de la cámara Mavic 3 Enterprise:
- Asegúrese de deshabilitar la configuración de "deswarping"
- Asegúrese de habilitar la configuración de "Obturador mecánico"
- Seleccione "MF" como modo de enfoque y establezca el enfoque en infinito
- Seleccione "Auto" para el modo de configuración de la cámara
- Si desea establecer la configuración de la cámara manualmente para la misión de fotogrametría, le recomendamos:
- Establecer ISO en automático
- Configure la velocidad de obturación a 1/1000 s o más rápido para evitar el desenfoque de movimiento (Mecánica hasta 1/2000 s)
- Establecer EV a 0
- Establecer AE entre 5,6 y 11
Para la configuración de la cámara Zenmuse P1:
- Asegúrese de deshabilitar la configuración de "deswarping"
- Asegúrese de habilitar la configuración de "Obturador mecánico"
- Seleccione "MF" como modo de enfoque y establezca el enfoque en infinito
- Seleccione "M" para el modo de configuración de la cámara
- Establecer ISO automático
- Configure manualmente la apertura en función de la luz ambiental. Asegúrate de configurar la apertura entre 5,6 y 11
- Establezca la velocidad de obturación en 1/500 s o más rápido para evitar el desenfoque de movimiento (Mecánica hasta 1/2000 s)
¿Qué es la opción de "eliminación de la distorsión" en la configuración de la cámara de la aplicación Pilot 2? ¿Debería habilitarla?
Habilitar la deformación calibra la distorsión óptica causada por la lente de la cámara, con imágenes calibradas en tiempo real capturadas y almacenadas en la tarjeta Micro-SD. Deshabilitar la corrección de distorsión significa que la cámara capturará una imagen sin editar con un efecto de ojo de pez. Los parámetros de distorsión de la lente de la Zenmuse P1, la Zenmuse L1, la lente ancha Mavic 3 Enterprise, la lente ancha multiespectral Mavic 3 y el Phantom 4 RTK se miden previamente de fábrica. Estos parámetros únicos se guardan en "DewarpData" en el campo XMP para cada imagen tomada. Se reconocen automáticamente cuando estas imágenes se importan al software DJI Terra. Sin embargo, para el software de fotogrametría de terceros, el usuario puede ingresar manualmente estos parámetros para calibrar la distorsión de la imagen.
RTK/PPK
¿Qué sistema de coordenadas se está escribiendo en las etiquetas geográficas de la foto? ¿Está siempre en geodésica WGS84?
No, el sistema de coordenadas de las imágenes depende de la fuente de corrección NTRIP RTK y es posible que no siempre se incluya en WGS84. Si está utilizando la estación móvil D-RTK2 como fuente RTK, entonces el sistema de coordenadas horizontales estaría en WGS84 EPSG:4326 y el sistema de coordenadas verticales en altura elipsoidal. En Terra, debe definir el sistema al importar imágenes; de lo contrario, Terra predeterminará que todos los sistemas de coordenadas de imagen sean horizontales en WGS84 (EPSG:4326) y verticales en altura elipsoidal.
¿Cómo puede usar una base RTK de terceros con drones DJI Enterprise?
Para estaciones base RTK de terceros, primero deberá configurar la transmisión del servicio NTRIP y asegurarse de que la base RTK y el M3M RC estén en la misma red Wi-Fi y luego en la aplicación Pilot - página de configuración RTK asegúrese de Ingrese las credenciales para configurar la conexión NTRIP. Puede encontrar más información en la página 46 del manual: https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230404/DJI_Mavic_3E_3T_User_Manual_EN.pdf
¿Es necesario inicializar la estación base D-RTK2 en una ubicación conocida antes de usarla?
La respuesta a esta pregunta depende de si está utilizando RTK para un posicionamiento de alta precisión y solo se preocupa por la precisión relativa o si está utilizando RTK para el registro de datos de alta precisión global, como trabajos topográficos. En el primer escenario, la respuesta es no, mientras que en el segundo escenario, la respuesta es sí.
¿Se puede conectar un dron DJI Enterprise con RTK a un servicio de suscripción NTRIP de terceros?
Sí, un dron habilitado para DJI Enterprise RTK puede conectarse directamente a un servicio Network RTK compatible con NTRIP, como Topcon Topnet Live, Leica Smartnet y Trimble VRS. Esto facilita la configuración del servicio.
En un sitio nuevo donde no hay puntos conocidos para configurar una estación base D-RTK2, ¿cómo podemos garantizar una buena precisión de los datos recopilados?
Si un servicio NTRIP está disponible, puede conectarse a Internet y usar RTK a través de un lanzador NTRIP, siempre que la línea de base (distancia entre el dron y el lanzador NTRIP) no esté demasiado lejos. Si Internet no es una opción, puede considerar usar un flujo de trabajo PPK para procesar posteriormente los datos de la estación base, así como los datos de la imagen del dron, en lugar de usar RTK. Obtenga más información sobre PPK aquí .
¿Qué tipos de mensajes RTCM son compatibles con los drones habilitados para DJI Enterprise RTK?
Consulte el siguiente cuadro para ubicar los tipos de mensajes RTCM compatibles correspondientes a los modelos de drones:
| Plataforma | Módulo RTK | Servicio RTK compatible | Tipo de mensaje RTCM compatible con el protocolo NTRIP |
Matriz M300 RTK Matriz M350 RTK | Antenas RTK duales | Red personalizada RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
Matriz M30 Matriz M30T | Antenas RTK duales | Red personalizada RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
Mavic 3 Empresa Térmico Mavic 3 Mavic 3 multiespectral | Opcional; Módulo RTK vendido por separado | Red personalizada RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
| Fantasma 4 RTK | Antena RTK única | Red personalizada RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
| Mavic 2 Enterprise Avanzado | Opcional; Módulo RTK vendido por separado | Red personalizada RTK (NTRIP) | MTC 3.0 RTCM 3.1 RTCM 3.2 |