Este artículo le ofrece una breve descripción general del flujo de trabajo del Poseidon SU30, desde la preparación, la medición, el procesamiento de datos hasta el mapeo.

1. Cuerpo del barco 2. Batería del barco 3. Dos antenas para comunicación del barco 4. Dos antenas para el puente de red 5. Una antena para control remoto manual 6. Puente de red 7. Controlador remoto 8. Adaptador de batería 9. SDE-18S 10. RTK 11 .Montaje de piscina lunar
Comprueba que los accesorios del Poseidon SU30 están completos y sigue los pasos para completar el montaje.

Operación automática
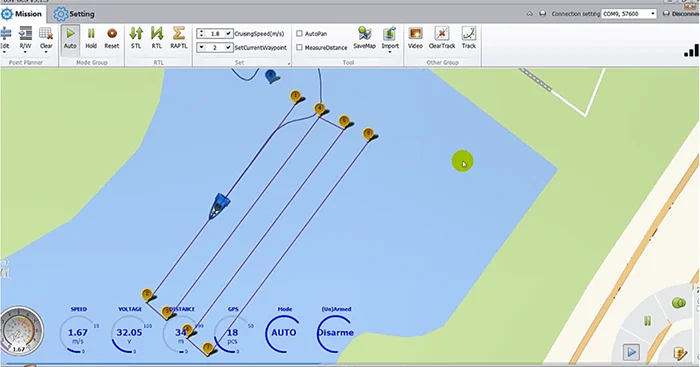
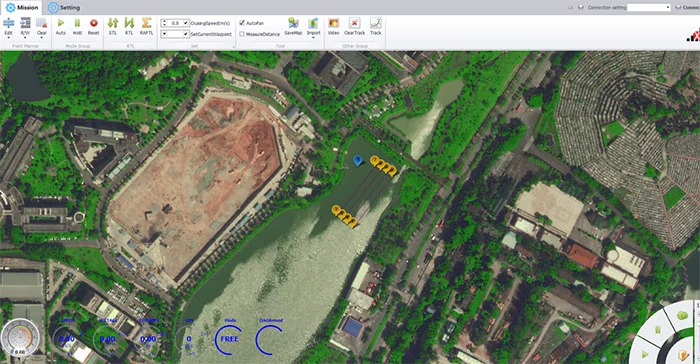
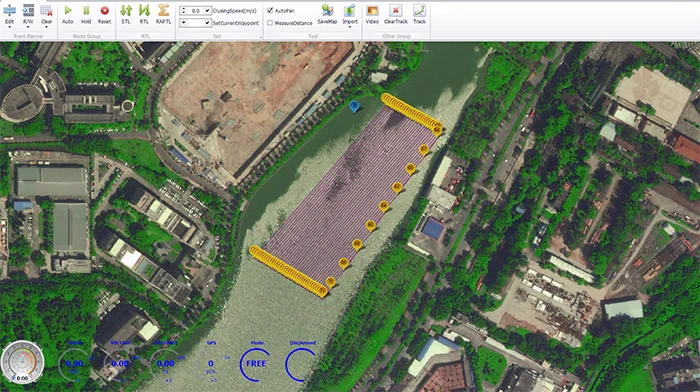
Piloto automático, realiza operación automática. Después de configurar el área de medición predefinida, SU30 puede completar la tarea de medición del área por sí solo después de iniciar la medición automática. Y el modo automático y el modo manual se pueden cambiar durante la operación.
Además, cuando el SU30 completa la tarea topográfica en un área predefinida, puede realizar una navegación autónoma y regresar al punto de partida.
Hasta 256 puntos de ruta de crucero automáticos
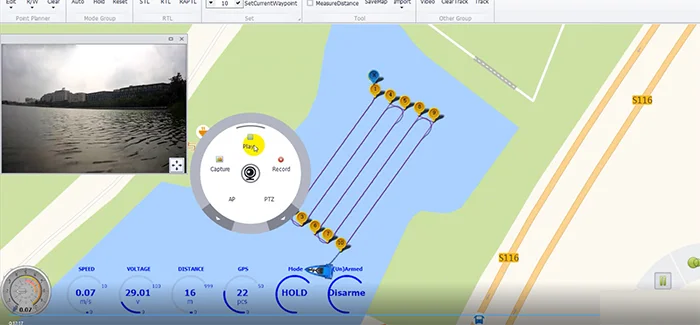
Sistema de imágenes de cámara configurado con SU30
Equipado con nuestro sistema de control de desarrollo propio y el software de medición HySurvey, con funciones de planificación del área de medición, recopilación de datos, navegación y posprocesamiento.
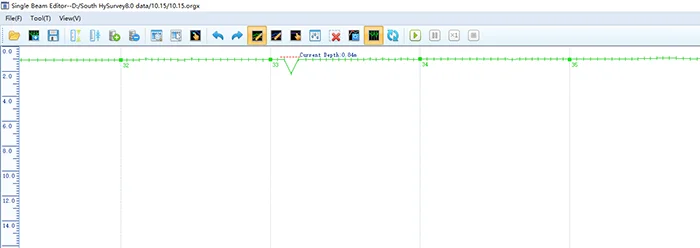
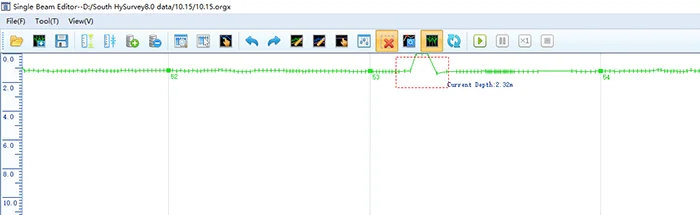
Dos métodos para modificar los datos incorrectos de profundidad del agua.
① Modifique los datos de profundidad del agua incorrectos directamente.
② Eliminar el punto de error.
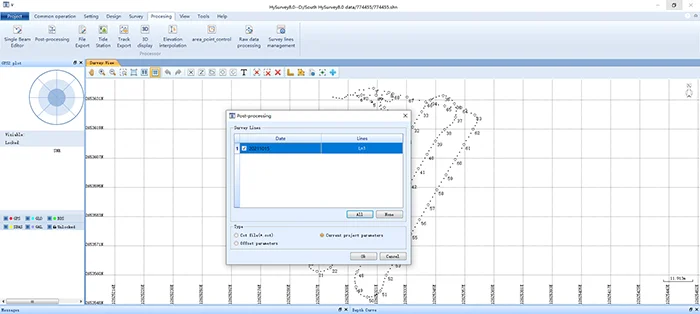

Diagrama de recopilación y procesamiento de información sobre la posición de las mareas.
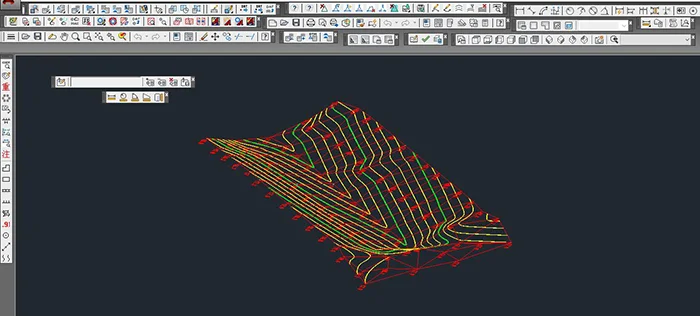
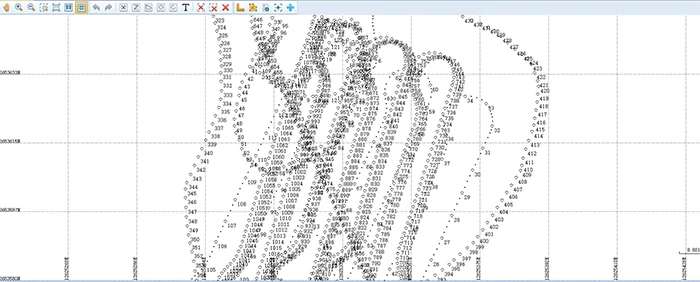
Mapa escaneado del terreno submarino dibujado con el software SOUTHGIS CASS.