Los drones son una respuesta comprobada para ayudar a documentar escenas y mantener seguro al personal. El mapeo de sUAS toma una fracción del tiempo de la documentación de escena tradicional o heredada (por ejemplo, estaciones totales), lo que resulta en una limpieza rápida. Las escenas reales se conservan en 3D con información detallada y precisión centimétrica.
Aquí hay un breve resumen del flujo de trabajo y enlaces a recursos en los que este artículo profundiza mucho más. En general, los diferentes equipos utilizan diferentes métodos y alentamos la creación de redes con otras agencias para encontrar lo que funciona mejor para usted.
Recolectar datos
1. Habilite la configuración adecuada de la cámara y RTK (consulte la guía ).
2. Planifique un mapeo automatizado o una misión oblicua en DJI Pilot 2 a ~75-125 pies.
3. Si es necesario, vuele en círculos alrededor de la escena a ~25 y ~50 pies con la configuración de fotografía cronometrada activada.
4. Si vuela de noche, considere el desenfoque de movimiento y la configuración de la cámara.
Procesar datos
5. Procesar datos en DJI Terra.
Utilizar datos
6. Utilice la salida de mapa 2D y modelo 3D/nube de puntos.
Recolectar datos
Consideraciones de escena
Antes de capturar datos, es importante considerar si la precisión del modelo es un factor importante o si se utilizará simplemente para conocer la situación. El uso de puntos de control en tierra y la conexión del dron a RTK son vías para aumentar la precisión, mientras que los puntos de control brindan una vía para verificar la precisión. La grabación de GCP/puntos de control se puede completar con un móvil GNSS RTK de nivel topográfico.
Sin puntos de control, es posible estimar la precisión relativa utilizando mediciones de la escena o mirando el RMSE georreferenciado en el informe DJI Terra Quality.
Durante la captura de datos, tenga en cuenta el lavado de accesorios y cualquier evidencia que pueda alterarse.
Configuración de captura de datos
Con un intervalo de fotos de 0,7 s, una velocidad máxima de 15 m/s, un obturador mecánico y una cámara ancha CMOS de 4/3 pulgadas, el Mavic 3 Enterprise es una excelente opción de hardware para la reconstrucción de accidentes. Este sistema también puede utilizar un módulo RTK acoplable para las correcciones, lo que permite utilizar algunos puntos de control en lugar de muchos puntos de control en tierra. DJI Pilot 2 es el software de control terrestre gratuito que se instala automáticamente en el control remoto y se actualiza con el control remoto.
Se recomienda utilizar la siguiente configuración de captura de datos que se cubre en nuestra Guía de encuestas de Mavic 3 Enterprise :
- Formato de imagen: JPG
- Relación de imagen: 4:3
- Obturador mecánico: ON
- Dewarping: APAGADO
- RTK: habilitado (recomendado)
Captura de datos automatizada
Como primer paso, la recopilación de datos automatizada es importante para recopilar fotos superpuestas de toda la escena. Durante el día, esto se logra a través de la sección Ruta de vuelo de la aplicación Pilot 2 seleccionando Mapeo, Mapeo con Smart Oblique seleccionado u Oblique.
Al planificar la misión, recomendamos encarecidamente incorporar lo siguiente en sus parámetros/configuraciones.
Configuración de la planificación de la misión :
- Superposición predeterminada de al menos 70 % lateral y 80 % frontal. Considere una mayor superposición si el sujeto no tiene mucha variación para ayudar al software de fotogrametría a unir las fotos.
- Al ejecutar una misión de mapeo con el M3E o P1, seleccione la opción oblicua inteligente si el área lo permite.
- Para una escena de accidente más pequeña, en términos generales, es ventajoso volar a la altitud segura más baja para despejar todos los obstáculos, a menudo a una altitud entre 75 y 125 pies. A medida que la escena aumenta de tamaño, se debe evaluar el tiempo de vuelo y la resolución, que tienen una relación inversa debido a la superposición requerida de las fotos.
Captura manual de datos
Una vez que se ha completado la captura de datos de alto nivel, es importante considerar recopilar fotos adicionales de la escena a una altitud más baja si se necesita una distancia de muestreo del suelo más baja.
Por ejemplo, si había un dosel de árboles a ambos lados de la carretera y el vuelo de la misión automatizada original se realizó a 125 pies AGL, entonces un vuelo manual a una altitud más baja podría recopilar imágenes complementarias.
Completar la captura manual de datos se logra más fácilmente mediante :
- Tomar fotos mientras se desciende desde la altitud de captura de datos de nivel superior
- Ajuste la posición del dron y el ángulo de inclinación de la cámara para colocar el vehículo o el área de interés en el centro del encuadre. Controle el ángulo de inclinación para mantener el cielo y el paisaje circundante fuera de la foto.
- Active la configuración de foto cronometrada (es decir, cada 2 segundos) para recopilar fotos superpuestas mientras vuela
- Vuela en círculos alrededor de la escena a ~50-75 pies
- Descienda otros 25 pies a ~25-50 pies
- Vuele otro círculo alrededor de la escena a ~25-50 pies
- Detener las fotos cronometradas y aterrizar el dron

Consideraciones nocturnas
Debido a que el dron se mueve a gran velocidad durante la recopilación de datos, los procesos anteriores funcionan mejor durante el día. Al cambiar a la noche hay diferentes consideraciones. El Mavic 3 Enterprise utiliza un sensor de mayor tamaño y un obturador mecánico que ayuda a capturar datos por la noche.


Foto de comparación entre M2EA (izquierda) y M3E (derecha) volando una misión de mapeo a 40 pies AGL a 2.3 mph
En primer lugar, el piloto debe tener mucho cuidado con respecto a la seguridad del vuelo, ya que los sistemas de visión utilizados para la detección de obstáculos se desactivarán en condiciones de poca luz. Considere tener un observador visual que vigile de cerca el estado de la aeronave durante el vuelo.
Lo siguiente es iluminar adecuadamente la escena. Colocar las luces en una posición elevada (~8 pies) alrededor de la escena y inclinarlas hacia abajo creará un halo de luz alrededor del sujeto. En este punto, el operador puede colocar un dron sobre la escena del accidente para saber si las luces están creando una foto sobreexpuesta. Si es así, ajuste la potencia de la luz o retroceda la(s) luz(es).
Si no puede ver los detalles en las imágenes, no aparecerán en los mapas o modelos. En general, es más fácil trabajar con algunas sombras que tener imágenes sobreexpuestas.
Dado que una escena puede ser más grande que un área única que puede iluminar con las luces disponibles, una técnica sería colocar puntos de control en el suelo en los bordes del área iluminada que luego se pueden incluir dentro de múltiples capturas de datos.
 Ejemplo de escena que se apaga (a través de Aaron Beckman)
Ejemplo de escena que se apaga (a través de Aaron Beckman)
 Ejemplo del "halo" de luz alrededor de una escena (a través de Aaron Beckman)
Ejemplo del "halo" de luz alrededor de una escena (a través de Aaron Beckman)
Misiones automatizadas por la noche:
Cuando planifique una misión automatizada por la noche, querrá reducir significativamente la velocidad de vuelo al valor más bajo posible para evitar la borrosidad y planificar el vuelo de la misión solo en el "halo" de luz creado por las luces. Volar tan bajo como 40 pies si no hay obstáculos también puede ser ventajoso. En general, este sería el enfoque más sencillo para la recopilación de datos, pero deberá asegurarse de verificar las fotos después de la recopilación de datos y monitorear de cerca el dron durante el vuelo.
Captura manual de datos por la noche:
Para garantizar una buena calidad de imagen, es posible que deba ajustar los parámetros de la cámara manualmente en lugar de simplemente permitir que la configuración automática haga el trabajo. Por ejemplo, puede aumentar la velocidad del obturador si partes de la escena aparecen apagadas y no puede mover las luces.
Un valor de exposición más largo permitirá que entre más luz. Sin embargo, según la carga útil y la luz que se utilice, es posible que el piloto deba hacer una pausa mientras se toma la foto para evitar que se vea borrosa. En términos generales, mantener la velocidad de obturación en 1/60 ayudará a evitar cualquier desenfoque incluso mientras el dron se está moviendo. Durante la captura manual de datos, la superposición de la cuadrícula en pantalla en la aplicación Pilot 2 se puede utilizar como referencia para la superposición.
Otra opción utilizada por algunas agencias es tomar un video mientras vuela el dron y sacar los marcos como imágenes.

Procesar datos
El procesamiento de imágenes en DJI Terra puede proporcionar un mapa 2D preciso y un modelo 3D para documentar la escena. En general, el proceso es bastante simple, como se describe en nuestra guía y video de inicio .
- Importe fotos y elija configuraciones/archivos de salida
- Al usar el accesorio del módulo RTK (detallado en nuestra guía de encuestas) con el Mavic 3 Enterprise, los metadatos tendrán en cuenta automáticamente las correcciones. Si utiliza un servicio NTRIP, es importante definir el sistema de coordenadas correcto para las imágenes antes de procesarlas (es decir, NAD83 EPSG 4269).
- Si se capturó un área demasiado amplia, después de importar fotos, puede seleccionar un determinado grupo de fotos para procesar en función de la ubicación GPS x/y o siguiendo la Aerotriangulación puede seleccionar un área determinada de la escena para procesar.
- Aerotriangulación completa
- Agregar puntos de control/GCP
- Procesar mapa 2D y modelo 3D.
- Después del procesamiento, puede verificar el informe para ver la precisión de los puntos de control y medir su restricción de escala.
Le recomendamos que pruebe Terra con una prueba de 1 mes disponible en la parte inferior de la página web de DJI Terra .
Utilizar salida
Una vez finalizado el procesamiento de datos, existen diferentes opciones para utilizar la salida. En general, este proceso permite a los investigadores, fiscales y miembros del jurado volver a visitar la escena en cualquier momento y desde cualquier lugar.
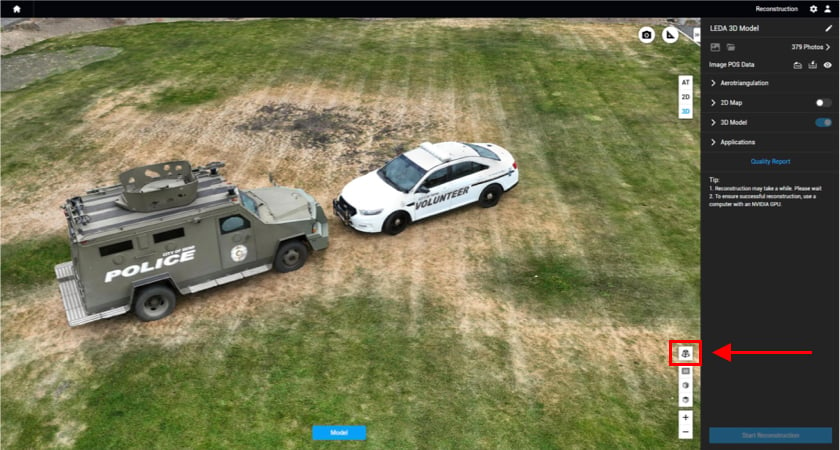
Para compartir datos de forma sencilla, se pueden incluir capturas de pantalla del mapa 2D o del modelo 3D en un pdf. O activar la herramienta de rotación automática 360 en DJI Terra resaltada en la foto a continuación es una herramienta útil para integrar dentro de una grabación de pantalla.
Los archivos en sí también se pueden compartir, incluidas las imágenes, los GCP, el mapa 2D y el modelo 3D, que se pueden ver en otra computadora con Windows que tenga instalado DJI Terra (gratuito para ver) u otro software GIS.
Además, importar los datos a un software especializado permite determinar la trayectoria de la bala, definir la línea de visión o realizar análisis forenses de aplastamiento, impulso y otros tipos. La nube de puntos incluso se puede fusionar con datos de escáner terrestre utilizando software gratuito como CloudCompare. La siguiente imagen muestra un ejemplo con y sin datos de drones.
Gracias
Gracias a Aaron Beckman, Eric Gunderson y Brandon Karr por sus contribuciones al uso de UAS en la seguridad pública y por este artículo.